I found one of those widely distributed GPS receiver modules in my collection of electronic material. I had bought it some years ago for a school project I did with students to launch a balloon into the stratosphere (Link to text in German). Here a video of the flight phase when maximum altitude was reached:
The GPS module that was used then has still been sleeping in my junk box. When looking through the C code I had written then I found that this could be optimized. I connected the GPS receiver to an AVR ATmega32 microcontroller, added a simple 2-lines-16-characters lcd and started rewriting the software for communicating with the module.
The Hardware
OK, an ATmgea32 is somehow “overkill” for this simple circuit, but I had already installed it on my breadboard. The data lines of the ATmega32 controller that are in use for this project are pointed out here:
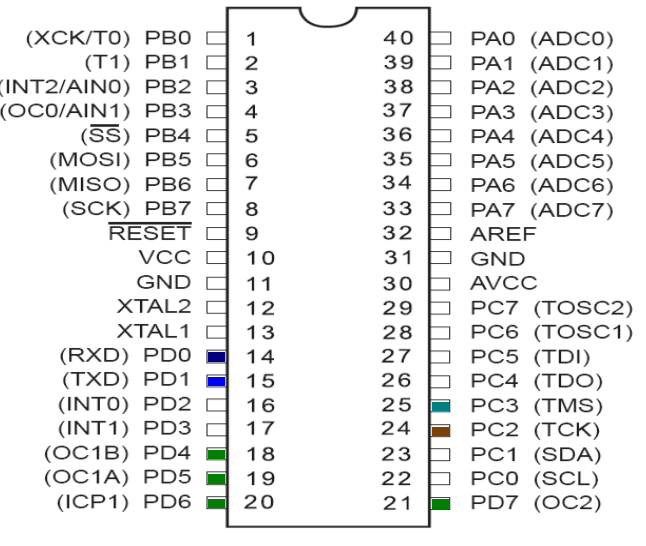
The GPS module is connected to the controller via the serial RS232 interface (TxD, RxD, PIN 15 and 14 of the micro). Note that RX of the GPS module must be connected to TxD with the controller and vice versa.
The rest of the layout is also very simple.
Microcontroller interface connections for this project
The lcd is driven in 4-bit-mode, thus only four display data lines are needed. Plus the 2 controls RS and E:
ATMega32 => LCD
- PD4 => LCD PIN D4
- PD5 => LCD PIN D5
- PD6 => LCD PIN D6
- PD7 => LCD PIN D7
- PC2 => LCD RS
- PC3 => LCD E
ATMega32 => GPS Module
- PD0 (RxD) => GPS TX
- PD1 (TxD) => GPS RX
Decoding GPS data
GPS data from the module comes coded as a so-called “NMEA”-string. “NMEA” stands for the American National Marine Electronics Association . The data is encrypted using a standardized ASCII format that appears in various patterns and is transferred by the GPS module regularly in very short intervals (about 1 second or less). The communication settings for the RS232 interface are fixed and can not be altered:
9600 baud, 8 data bits, 1 stop bit, no parity
The ATMega’s UART (universal asynchronous receiver and transmitter) must be set with an initialization routine to the required parameters:
[code language=”css”]
//Init UART
void uart_init()
{
/* 9600 Baud */
UBRRL = 51; UBRRH = 0;
/* RX and TX on */
UCSRB = (1<<RXEN)|(1<<TXEN);
/* 8 databits, 1 stopbit, No parity */
UCSRC = (1<<URSEL)|(1<<UCSZ1)|(1<<UCSZ0);
}
[/code]
NMEA strings (example)
There are various types of data strings transferred by the module, each serving an individual purpose. They are all coded with a leading identifier marked by a $-sign and an identifier code. We will discuss the absolute basic string that delivers essential GPS information, the so-called “GPRMC”-string, where the letters “RMC” represent “recommended minimum sentence”.
This sequence contains all the necessary data for a basic GPS operation and therefore is ideal for experiments with the GPS module. Example for such a string:
$GPRMC,191410,A,4735.5634,N,00739.3538,E,0.0,0.0,181102,0.4,E*19
The various data fields are separated by a comma, please note that the data fields may have various width so just counting bytes is not reliable if you want to “land” in a specific field. Instead the comma separators must be counted.
What do the separate data fields mean?
The first entry (“191410”) after the “$GPRMC” intro is the UTC time stamp, telling when the recent GPS data set was processed, i. e. the current time in HHMMSS- format. There might be even 10th of seconds then the format is HHMMSSss.
Next is a letter (“A” for correct data, “V” (void) if the receiver was not able to get correct data), that indicates if the data is valid and can be used or not. You can use that to discard the data set when the receiver is not able to detect a valid GPS signal.
Following a number (here “4735.5634”) together with the subsequent letter (N or S) indicates the latitude of the current position. This is a 100fold decimal value formatted by a decimal separator. Latitude can be in the range from 0 to 90 degrees North or South. Here it is about 47 degrees in the northern hemisphere.
Subsequently the same coding is used for transferring longitude data. Longitude is in the range from 0 to 180 degrees East or West with the Prime Meridian in Greenwich as separator.
Next two values (0.0 and 0.0) indicate ground speed in knots and bearing in degrees.
“181102” is the date stamp (18th Nov 2002).
“0.4” and “E” indicate a magnetic declination (degrees and direction) that might occur.
“19” is the XOR generated checksum of the string. I found that data transfer is very reliable so I don’t calculate this.
Calculating QTH locator
For a radio amateur it is clear that GPS data must be converted to the Maidenhead system to determine the current QTH locator (JN49AB in my case). Thus I have programmed a short function that can convert decimal data for latitude and longitude to the Maidenhead system:
[code language=”css”]
//Calc QTH locator from decimal value for latitude and
//longitude. o1 and o2 are signifier for ‘E or ‘W’ (longitude) resp.
//’N’ or ‘S’ for latitude
//example for calling: calc_maidenhead(8.002, ‘E’, 49.1002, ‘N’, buf);
void calc_maidenhead(double longitude, char o1, double latitude, char o2, char *buffer)
{
//Longitude
int deg_lo, lo1, lo2, lo3;
double deg10_lo;
//Lattitude
int deg_la, la1, la2, la3;
double deg10_la;
deg_lo = longitude; //Truncate values for longitude and latitude
deg_la = latitude;
deg10_lo = (longitude – deg_lo) * 12; //Calculate fraction behind decimal separator
deg10_la = (latitude – deg_la) * 24;
//Longitude
if(o1 == ‘E’)
{
lo1 = 180 + deg_lo;
}
else
{
lo1 = 180 – deg_lo;
}
lo2 = lo1 / 20;
lo3 = lo1 – lo2 * 20;
//Lattitude
if(o2 == ‘N’)
{
la1 = 90 + deg_la;
}
else
{
la1 = 90 – deg_la;
}
la2 = la1 / 10;
la3 = la1 – la2 * 10;
*(buffer + 0) = lo2 + 65;
*(buffer + 1) = la2 + 65;
*(buffer + 2) = lo3 / 2 + ‘0’;
*(buffer + 3) = la3 + ‘0’;
*(buffer + 4) = (int) deg10_lo + ‘A’;
*(buffer + 5) = (int) deg10_la + ‘A’;
}[/code]
Parameters handed over to the function are
- Longitude in decimals (double),
- ‘E’ or ‘W’ for orientation,
- Latitude in decimals (double),
- ‘N’ or ‘S’ for orientation,
- a 6 byte buffer (+ 1 byte for “\0” termination) referenced by address for the locator data.
The program rolls through the data permanently giving relevant information on the display with changes every second. Due to the fact that I haven’t implemented error handling there might be more or less useles indications when data from the GPS receiver is corrupted or invalid. But mostly the routine works out very fine without any complaint. You can use the ‘A’ or ‘V’ indicator transferred to change the display routine if unvalid data is detected.
By the end of this article you can get the full C-code for the project. Thanks for reading!
73 de Peter (DK7IH)
[code language=”css”]
/*****************************************************************/
/* GPS with ATMega32 */
/* ************************************************************ */
/* Mikrocontroller: ATMEL AVR ATmega32, 8 MHz */
/* */
/* Compiler: GCC (GNU AVR C-Compiler) */
/* Autor: Peter Rachow 2018 */
/* Fuses: -U lfuse:w:0xe4:m -U hfuse:w:0xd9:m */
/*****************************************************************/
// This code reads data from a GPS module via RS232 interface and
// decodes the basic NMEA string of $GPRMC type, the so-called
// “RMC” (Recommended Minimum Specific GNSS Data) string.
// Displayed are Date, Time, QTH-Locator (Maidenhead), Lattitude and
// Longitude and Ground speed
/* PORTS */
// O U T P U T
// LCD
// RS = PC2
// E = PC3
// D4…D7 = PD4..PD7
// PD0 TX at GPS module
// PD1 RX at GPS module
#define F_CPU 8000000
#include
#include
#include
#include
#include
#include
#include
#include
#include
int main(void);
/***************/
/* LCD-Display */
/***************/
#define LCD_INST 0x00
#define LCD_DATA 0x01
void lcd_write(char, unsigned char);
void lcd_write(char, unsigned char);
void set_rs(char);
void set_e(char);
void lcd_init(void);
void lcd_cls(void);
void lcd_line_cls(int);
void lcd_putchar(int, int, unsigned char);
void lcd_putstring(int, int, char*);
void lcd_putnumber(int, int, long, int);
void lcd_display_test(void);
void setcustomcharacters(void);
/*******************/
/* Stringhandling */
/*******************/
int strlen(char *s);
int instring(char*, char*);
int strcomp(char*, char*);
void int2asc(long, int, char*, int);
/*******************/
/* U A R T */
/*******************/
void uart_init(void);
void uart_putc(char);
void uart_send_string(char*);
void init_rx_buffer(void);
char make_crc(int, int);
/**********************/
/* V A R I A B L E S */
/**********************/
//USART defines & variables
#define RX_BUF_SIZE 64
char rx_buf[RX_BUF_SIZE];
int rx_buf_cnt = 0;
/*****************************/
/* Result string formatting */
/*****************************/
void get_time(char*, char*);
int get_receiver_status(char*);
void get_latitude(char*, char*);
void get_longitude(char*, char*);
void get_latitude_ns(char*, char*);
void get_longitude_ew(char*, char*);
double get_gps_coordinate_decimal(char*, int, char*);
void get_ground_speed(char*, char*);
void get_ground_speed(char*, char*);
void get_date(char*, char*);
void calc_maidenhead(double, char, double, char, char*);
/**************************************/
/* L C D */
/**************************************/
/* Send one byte to LCD */
void lcd_write(char lcdmode, unsigned char value)
{
int x = 16, t1;
set_e(0);
if(!lcdmode)
{
set_rs(0);
}
else
{
set_rs(1);
}
_delay_ms(1);
set_e(1);
/* Hi */
for(t1 = 0; t1 < 4; t1++)
{
if(value & x)
{
PORTD |= x;
}
else
{
PORTD &= ~(x);
}
x *= 2;
}
set_e(0);
x = 16;
set_e(1);
/* Lo */
for(t1 = 0; t1 < 4; t1++)
{
if((value & 0x0F) * 16 & x)
{
PORTD |= x;
}
else
{
PORTD &= ~(x);
}
x *= 2;
}
set_e(0);
}
/* RS */
void set_rs(char status)
{
if(status)
{
PORTC |= (1 << PC2);
}
else
{
PORTC &= ~(1 << PC2);
}
}
/* E */
void set_e(char status)
{
if(status)
{
PORTC |= (1 << PC3);
}
else
{
PORTC &= ~(1 << PC3);
}
}
void lcd_putchar(int row, int col, unsigned char ch)
{
lcd_write(LCD_INST, col + 128 + row * 0x40);
lcd_write(LCD_DATA, ch);
}
void lcd_putstring(int row, int col, char *s)
{
unsigned char t1;
for(t1 = col; *(s); t1++)
{
lcd_putchar(row, t1, *(s++));
}
}
void lcd_putnumber(int y, int x, long number, int dec)
{
char *buf;
buf = malloc(32);
int2asc(number, dec, buf, 31);
lcd_putstring(y, x, buf);
free(buf);
}
void lcd_cls(void)
{
lcd_write(LCD_INST, 1);
}
void lcd_init(void)
{
lcd_write(LCD_INST, 40);
//Matrix 5*7
lcd_write(LCD_INST, 8);
/* Display on, Cursor off, Blink off */
/* Entrymode !cursoincrease + !displayshifted */
lcd_write(LCD_INST, 12);
//4-Bit-Mode
lcd_write(LCD_INST, 2);
lcd_cls();
}
void lcd_line_cls(int ln)
{
int t1;
for(t1 = 0; t1 < 15; t1++)
{
lcd_putchar(1, t1, 32);
}
}
//Define own chars
void setcustomcharacters(void)
{
int i1;
unsigned char adr=64;
unsigned char customchar[]={ 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // \0
0x04, 0x0A, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00}; //°-sign
lcd_write(LCD_INST, 0);
lcd_write(LCD_DATA, 0);
//Send data to CGRAM in lcd
for (i1 = 0; i1 < 16; i1++)
{
lcd_write(LCD_INST, adr++);
lcd_write(LCD_DATA, customchar[i1]);
}
}
/***********************/
//
// STRING-FUNCTIONS
//
/**********************/
//Convert int number to string
void int2asc(long num, int dec, char *buf, int buflen)
{
int i, c, xp = 0, neg = 0;
long n, dd = 1E09;
//Write 0 to buffer in case value == 0
if(!num)
{
buf[0] = '0';
buf[1] = 0;
return;
}
if(num < 0)
{
neg = 1;
n = num * -1;
}
else
{
n = num;
}
//Fill buffer with \0
for(i = 0; i < 12; i++)
{
*(buf + i) = 0;
}
c = 9; //Max. number of displayable digits
while(dd)
{
i = n / dd;
n = n – i * dd;
*(buf + 9 – c + xp) = i + 48;
dd /= 10;
if(c == dec && dec)
{
*(buf + 9 – c + ++xp) = ',';
}
c–;
}
//Search for 1st char different from '0'
i = 0;
while(*(buf + i) == 48)
{
*(buf + i++) = 32;
}
//Add minus-sign if neccessary
if(neg)
{
*(buf + –i) = '-';
}
//Eleminate leading spaces
c = 0;
while(*(buf + i))
{
*(buf + c++) = *(buf + i++);
}
*(buf + c) = 0;
}
//Compare 2 strings
int strcomp(char *s1, char *s2)
{
int t1;
for(t1 = 0; t1 < strlen(s2); t1++)
{
if(*(s1 + t1) != *(s2 + t1))
{
return 0;
}
}
return 1;
}
//Get length of string
int strlen(char *s)
{
int t1 = 0;
while(*(s + t1++));
return (t1 – 1);
}
//Find s2 in s1 if present, hand back position in string if yes
int instring(char *s1, char *s2)
{
int t1, t2, ok;
for(t1 = 0; *(s1 + t1) ; t1++)
{
ok = 1;
for(t2 = 0; t2 < strlen(s2); t2++)
{
if(*(s1 + t1 + t2) != *(s2 + t2))
{
ok = 0;
}
}
if(ok)
{
return t1;
}
}
return 0;
}
//************/
// UART
//************/
//Init UART
void uart_init()
{
/* 9600 Baud */
UBRRL = 51;
UBRRH = 0;
/* RX and TX on */
UCSRB = (1<<RXEN)|(1<<TXEN);
/* 8 Datenbits, 1 Stopbit, keine Paritaet */
UCSRC = (1<<URSEL)|(1<<UCSZ1)|(1<<UCSZ0);
}
//Send 1 char to UART
void uart_putc(char tx_char)
{
while(!(UCSRA & (1<<UDRE)));
UDR = tx_char;
}
//Send one string to UART
void uart_send_string(char *s)
{
int t1 = 0;
while(*(s + t1))
{
uart_putc(*(s + t1++));
}
uart_putc(13);
uart_putc(10);
}
uint8_t uart_getc(void)
{
while(!(UCSRA & (1<<RXC))); // warten bis Zeichen verfuegbar
return UDR; // Zeichen aus UDR an Aufrufer zurueckgeben
}
//Init RX buffer
void init_rx_buffer(void)
{
int t1;
for(t1 = 0; t1 < RX_BUF_SIZE – 1; t1++)
{
rx_buf[t1] = 0;
}
rx_buf_cnt = 0;
}
/* CRC-calculation */
char make_crc(int buflen, int addchar)
{
int t1, x = 0;
for(t1 = 0; t1 < buflen; t1++) /* Puffer bis dato */
{
x = x ^ rx_buf[t1];
}
x = x ^ addchar; /* Sendebyte */
return x;
}
///////////////////// END UART ///////////////
//////////////////////////////
// //
// NMEA decode functions //
// //
//////////////////////////////
//Format date string
void get_date(char *buffer2, char *buffer3)
{
int t1, t2 = 0;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 9th datafield
t1 = 0;
t2 = 0;
while(t2 != 9 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 10 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 < p2 – 1; t1++)
{
if((t1 – p1) == 2 || (t1 – p1) == 4)
{
*(buffer3 + t2++) = '.';
}
*(buffer3 + t2++) = *(buffer2 + t1);
}
}
//Format time string
void get_time(char *buffer2, char *buffer3)
{
int t1, t2 = 0;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find first datafield
t1 = 0;
while(*(buffer2 + t1) != ',' && t1 < RX_BUF_SIZE)
{
t1++;
}
p1 = t1 + 1;
//Find dot in timestring
t1 = p1 + 1;
while(*(buffer2 + t1) != '.' && t1 < RX_BUF_SIZE)
{
t1++;
}
p2 = t1;
//Copy relevant prt of string to buffer3
for(t1 = p1; t1 < p2; t1++)
{
if(t1 == 9 || t1 == 11)
{
*(buffer3 + t2++) = ':';
}
*(buffer3 + t2++) = *(buffer2 + t1);
}
}
//Format receiver status string
int get_receiver_status(char *buffer)
{
int t1, t2 = 0;
int p1;
//Find second datafield
t1 = 0;
while(t2 != 2 && t1 < RX_BUF_SIZE)
{
if(*(buffer + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
if(*(buffer + p1) == 'A')
{
return 0;
}
else
{
return 1;
}
}
//Format latitude to degrees
void get_latitude(char *buffer2, char *buffer3)
{
int t1, t2;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 3rd datafield
t1 = 0;
t2 = 0;
while(t2 != 3 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 4 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//No data available
if(p2 – p1 == 1)
{
return;
}
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 < p2 – 1; t1++)
{
if(t1 == p1 + 2)
{
*(buffer3 + t2++) = 1; //°
}
*(buffer3 + t2++) = *(buffer2 + t1);
}
}
//Format latitude orientation
void get_latitude_ns(char *buffer2, char *buffer3)
{
int t1, t2;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 4th datafield
t1 = 0;
t2 = 0;
while(t2 != 4 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 5 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//No data available
if(p2 – p1 == 1)
{
return;
}
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 < p2 – 1; t1++)
{
*(buffer3 + t2++) = *(buffer2 + t1);
}
}
//Format longitude
void get_longitude(char *buffer2, char *buffer3)
{
int t1, t2;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 5th datafield
t1 = 0;
t2 = 0;
while(t2 != 5 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 6 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//No data available
if(p2 – p1 == 1)
{
return;
}
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 < p2 – 1; t1++)
{
if(t1 == p1 + 3)
{
*(buffer3 + t2++) = 1; //°
}
*(buffer3 + t2++) = *(buffer2 + t1);
}
}
//Format longitude orientation
void get_longitude_ew(char *buffer2, char *buffer3)
{
int t1, t2;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 5th datafield
t1 = 0;
t2 = 0;
while(t2 != 6 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 7 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//No data available
if(p2 – p1 == 1)
{
return;
}
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 lattiude
double get_gps_coordinate_decimal(char *buf, int ctype, char *retbuf)
{
int t1, t2;
int sp; //Position of 1st comma of relevant data field
double rval = 0;
double x;
char *l_str = malloc(20);
if(!ctype)
{
sp = 5; //Longitude
}
else
{
sp = 3; //Lattitude
}
//Init temporary string
for(t1 = 0; t1 < 20; t1++)
{
*(l_str + t1) = 0;
}
//Search start position of value (3rd or 5th ',')
t1 = 0; t2 = 0;
while(buf[t1] != 0 && t2 != sp)
{
if(buf[t1] == ',')
{
t2++;
}
t1++;
}
sp = t1;
//Load relevant part of original string to new bufferstring
t2 = 0;
for(t1 = sp; *(buf + t1) != ','; t1++)
{
*(l_str + t2++) = buf[t1];
}
//Check multiplier
if(!ctype)
{
x = 100;
}
else
{
x = 10;
}
//Convert string to FP number
for(t1 = 0; l_str[t1] != 0; t1++)
{
if(l_str[t1] != '.')
{
rval += (double)(l_str[t1] – 48) * x;
x /= 10;
}
}
free(l_str);
//Get orientation indicator (N/S or W/E)
if(!ctype)
{
sp = 6; //Longitude
}
else
{
sp = 4; //Lattitude
}
//Search start position (4th or 6th ',')
//where letter is expected
t1 = 0; t2 = 0;
while(buf[t1] != 0 && t2 != sp)
{
if(buf[t1] == ',')
{
t2++;
}
t1++;
}
sp = t1;
retbuf[0] = buf[sp];
return rval;
}
//Ground speed
void get_ground_speed(char *buffer2, char *buffer3)
{
int t1, t2;
int p1, p2;
//Zero buffer3
for(t1 = 0; t1 < RX_BUF_SIZE; t1++)
{
*(buffer3 + t1) = 0;
}
//Find 5th datafield
t1 = 0;
t2 = 0;
while(t2 != 7 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p1 = t1;
//Find end of datafield
t1 = 0;
t2 = 0;
while(t2 != 8 && t1 < RX_BUF_SIZE)
{
if(*(buffer2 + t1) == ',')
{
t2++;
}
t1++;
}
p2 = t1;
//No data available
if(p2 – p1 == 1)
{
return;
}
//Copy relevant prt of string to buffer3
t2 = 0;
for(t1 = p1; t1 = RX_BUF_SIZE)
{
/*
for(t1 = 0; t1 = 0; t1–)
{
//Scan for specific identifier of NMEA message RMC Example "$GPRMC"
valid = 1;
for(t2 = 0; t2 < 5; t2++)
{
if(rx_buf[t1 + t2] != msg_code[t2])
{
valid = 0;
}
}
if(valid) //Infotype OK, data found
{
//Copy rx-buffer to buffer2
//Init buffer2
for(t2 = 0; t2 < RX_BUF_SIZE; t2++)
{
*(buf2 + t2) = 0;
}
//Copy relevant part of rx-buffer to buffer2
t3 = 0;
for(t2 = t1; t2 < rx_buf_cnt && rx_buf[t2] != '*'; t2++)
{
*(buf2 + t3) = rx_buf[t2];
t3++;
}
lcd_cls();
//Display information
lcd_putstring(0, 0, " GPS Receiver");
lcd_putstring(1, 0, " DK7IH 2018");
_delay_ms(dispdelay);
lcd_cls();
//Message string
lcd_putstring(0, 2, "Message type");
lcd_putstring(1, 4, msg_code);
_delay_ms(dispdelay);
lcd_cls();
//QTH locator (Maidenhead)
lcd_putstring(0, 2, "QTH Locator");
rbuf0 = malloc(4);
rbuf1 = malloc(4);
for(t1 = 0; t1 < 4; t1++)
{
*(rbuf0 + t1) = 0;
*(rbuf1 + t1) = 0;
}
lon = get_gps_coordinate_decimal(buf2, 0, rbuf0); //Calc longitude
lat = get_gps_coordinate_decimal(buf2, 1, rbuf1); //Calc latitude
rstr = malloc(7);
for(t1 = 0; t1 < 7; t1++)
{
*(rstr + t1) = 0;
}
calc_maidenhead(lon, rbuf0[0], lat, rbuf1[0], rstr);
//calc_maidenhead(8.3362, 'E', 49.0145, 'N', rstr); //Test for "JN49EA"
lcd_putstring(1, 4, rstr);
_delay_ms(dispdelay);
free(rbuf0);
free(rbuf1);
free(rstr);
lcd_cls();
//DATE
lcd_putstring(0, 6, "Date");
get_date(buf2, buf3);
lcd_putstring(1, 4, buf3);
_delay_ms(dispdelay);
lcd_cls();
//TIME
lcd_putstring(0, 3, "Time (UTC)");
get_time(buf2, buf3);
lcd_putstring(1, 4, buf3);
_delay_ms(dispdelay);
lcd_cls();
//Receiver status
lcd_putstring(0, 0, "Receiver status");
if(get_receiver_status(buf2) == 0)
{
lcd_putstring(1, 7, "OK");
}
else
{
lcd_putstring(1, 7, "ERR");
}
_delay_ms(dispdelay);
lcd_cls();
//Lattitude
lcd_putstring(0, 4, "Lattitude");
get_latitude(buf2, buf3);
lcd_putstring(1, 2, buf3);
get_latitude_ns(buf2, buf3); //N or S
lcd_putstring(1, 14, buf3);
_delay_ms(dispdelay);
lcd_cls();
//Longitude
lcd_putstring(0, 4, "Longitude");
get_longitude(buf2, buf3);
lcd_putstring(1, 2, buf3);
lcd_putstring(0, 4, "Longitude"); //E or W
get_longitude_ew(buf2, buf3);
lcd_putstring(1, 15, buf3);
_delay_ms(dispdelay);
lcd_cls();
//Ground speed
lcd_putstring(0, 2, "Ground speed");
get_ground_speed(buf2, buf3);
lcd_putstring(1, 5, buf3);
lcd_putstring(1, 12, "[kn]");
_delay_ms(dispdelay);
lcd_cls();
}
}
rx_buf_cnt = 0;
}
else
{
rx_buf[rx_buf_cnt++] = ch;
}
}
return 0;
}
[/code]
Some module dependent code is also required to select which NEMA sentences you want the module to spit out. Usually this is a one time thing as the module stores the settings in non-volatile memory, but not always. Some cheaper GPS receivers have to be programmed upon each power up / reboot. Another configuration item is the rate at which the update occurs. Usually once a second, but cheap modules might only update at a 1/10 hz rate (YUCK). The bearing data usually wont be present unless the receiver is moving, IE: the ground speed isn’t zero. It IS possible to combine TWO GPS receivers, or have a receiver with TWO antennas separated by a known distance to get a bearing fix without movement. This is cool, you could then mount the GPS receiver and the two antennas on your HF beam and get an accurate beam heading. Such devices are used in the cell phone industry to align cell tower antennas. (As you might guess, I’ve played around with GPS before).
Interesting is that my module never says ground speed = 0. But I don”t move, I swear” (except from the earth’s rotation, its way round the sun and the circulation of our solar system round the center of the galaxy. ;-)) 73 de Peter